DIAN RACING

同済電動フォーミュラーチーム
2026
JOIN US
DIAN RACING
革新 / 協働 / 情熱 / 卓越
仲間になろう
私たちは自らの手でマシンを造り上げる
教科書の知識を実戦で沸騰させる
志を同じくする仲間と肩を並べ
チームだけの力を結集する
トップ企業のリソースと連携し
未来への道を切り拓く
FSAE国際大会の舞台に立ち
情熱と栄光のために全力で駆け抜ける
2026 DIANRACING
01
私たちについて
01
チーム紹介
同済大学電動フォーミュラーチーム(DIAN Racing)は、2013年3月の設立以来、常に電動フォーミュラカーの最前線に立ち、速度と効率の極限を追求するとともに、新エネルギー車技術の発展と持続可能な未来に注力しています。世界トップレベルの大学生レーシングチームを目指し、FSAEシリーズ大会に積極的に参加し、新エネルギー車産業の交流プラットフォームを構築しています。
チームのスナップショット
ここでは、最先端の電気自動車技術に触れられるだけでなく、マシンの設計、製造、テスト、プロモーションの全過程に自ら参加できます。フレームから電子制御、空力から自動運転まで、私たちの探求の一歩一歩は挑戦に満ち、情熱にあふれています。新時代の機会を前に、DIAN Racingはインテリジェント電動フォーミュラカーへと加速しています。未来を共に描くため、あなたの参加を待っています!


02
チーム戦績
2025年中国大学生電動フォーミュラ大会:
全国準優勝
アクセラレーション 第1位
レーシングカー設計 第2位
軽量化 第3位
2025年中国大学生自動運転フォーミュラ大会:
全国二等賞
最優秀システム設計賞
2018年日本学生フォーミュラ大会EVクラス準優勝
2019年日本学生フォーミュラ大会EVクラス第3位
2020年中国大学生電動フォーミュラ大会 年間総合優勝
2021年中国大学生自動運転フォーミュラ大会 第3位
2023年日本学生フォーミュラ大会:
最優秀空力賞 第2位
最優秀Mathworks賞 第2位
最優秀CAE賞 第1位
最優秀人間工学賞 第3位
設計審査 第3位
2023年中国大学生電動フォーミュラ大会:
設計レポート 第1位
効率テスト 第2位
三電技術共有賞 第3位
MATLAB/Simulink応用賞 三等賞
優秀ビジネスプラン賞
2024年中国大学生電動フォーミュラ大会:
設計レポート 第3位
「ベテランドライバー」賞

03
スポンサーリソース
DIAN Racingは、ポルシェ、シェフラーなどの世界的トップ自動車メーカーや部品サプライヤーを含む80社以上の有名企業と長期的かつ安定した協力関係を築いてきました。これらの企業は技術面・資金面でのサポートを提供するだけでなく、隊員たちが業界に入るための広い窓口を開いています。チームは一貫して、すべてのDIAN Racerにハイレベルなイノベーション実践のプラットフォームを提供し、実際のプロジェクトで経験を積み、競争力を高められるよう努めています。
2026 DIANRACING
02
募集職種
01
ビジネス & マネジメント

ブランドイメージ管理
1. 国内外のFSAEビジネス・スポンサーシップ分野の情報を収集・整理し、最新のトレンドを把握する; 2. チーム全体の発展戦略に基づき、戦略および年間計画を策定する; 3. DIAN Racingのブランドイメージのポジショニングと設定に適合するようブランドイメージを管理し、活動写真の撮影、ポスター、パンフレット、プロモーションビデオなどのブランド販促物のデザイン・制作を統括する; 4. 年間計画に基づきイベントの実行を推進し、展示会、ロードショー、プロモーションイベントなどのマーケティングコミュニケーション施策の企画・実施に携わり、マーケティング予算とコスト管理を担当する; 5. 大会ルールと事前計画に基づき、大会におけるビジネスレポートプレゼンテーション(静的審査)を完了する。
使用ツールチェーン:
Adobe Illustrator
Adobe Photoshop
Adobe Premiere Pro; Keyshot
秀米, Canva

スポンサーシップリレーション管理
1. チームの既存スポンサーとの窓口となり、スポンサーのニーズを聞き出して理解し、それを正確にチーム内部に伝え実行する; 2. チームのニーズに基づき、新たなスポンサーシップチャネルを開拓する; 3. スポンサーのニーズに合わせ、スポンサーとの協力プランを策定し、その実行を推進する; 4. 年間計画に基づきスポンサー活動の実行を推進し、展示会、ロードショー、プロモーションイベントなどのマーケティングコミュニケーション施策の企画・実施に携わり、マーケティング予算とコスト管理を担当する; 5. 大会ルールと事前計画に基づき、大会におけるビジネスレポートプレゼンテーション(静的審査)を完了する。
使用ツールチェーン:
Adobe Illustrator; Adobe Photoshop; Adobe Premiere Pro; Keyshot

チームリソース管理
1. チームの人員情報管理を担当し、チームの人員構成に精通し、隊員情報のメンテナンスと更新を担当する。 2. スポンサーのニーズに合わせ、スポンサーとの協力プランを策定し、その実行を推進する。 3. ニーズに応じてプロジェクト管理ソフトウェアをカスタマイズ開発し、チーム代表や機能責任者と協働してプロジェクト管理を展開する。 4. データ分析用のプログラミング言語を学び、ニーズに応じてチームの時系列データベースを構築・保守し、エンジニアと共に様々なシナリオでのデータ分析を実現する。 5. 資金を適切に配分し、チームの資金繰りの正常な運営を保証する。 6. ワークショップのレイアウトと日常管理を取り仕切り、チーム活動の円滑な遂行を保証する。 7. 必要に応じてチームビルディングや見学などの活動を企画し、チームの内部文化を構築する。 8. 大会ルールと事前計画に基づき、大会におけるコストレポートプレゼンテーション(静的審査)を完了する。
使用ツールチェーン:
DolphinDB; Adobe Photoshop; Keyshot; MATLAB; Python
02
シャシー、ボディ & ダイナミクス制御
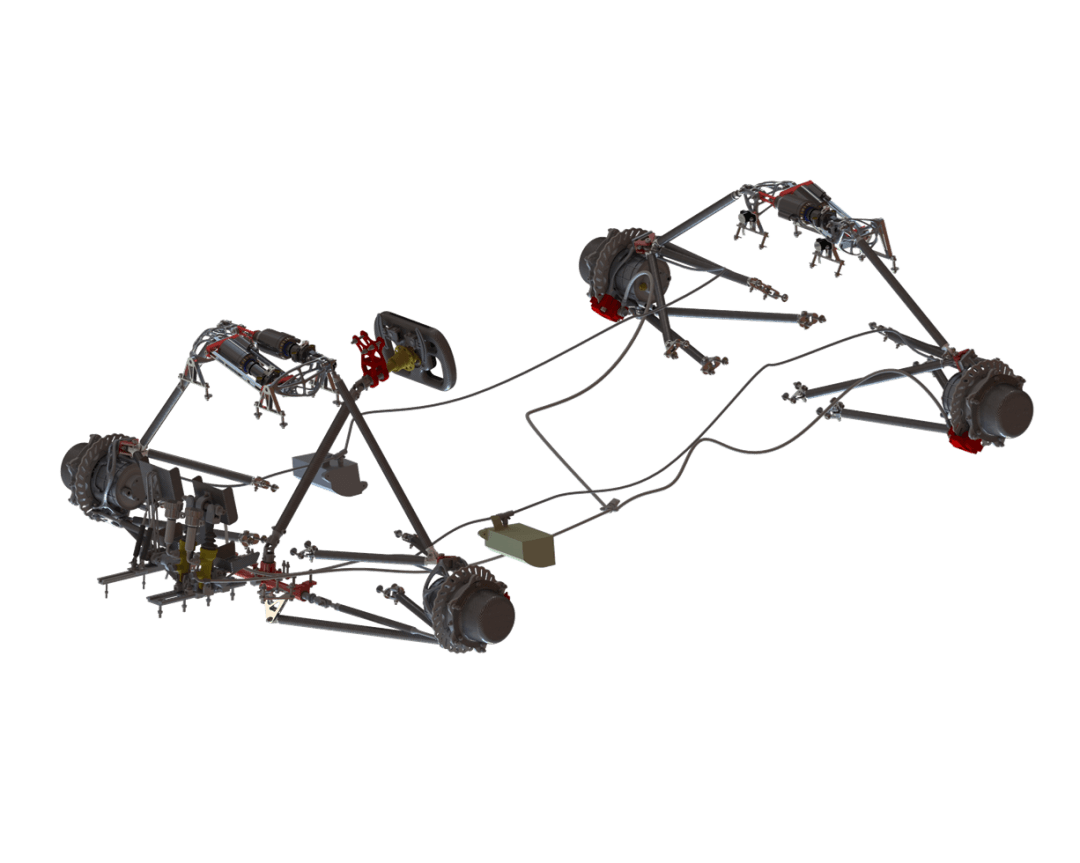
シャシー & ダイナミクス制御アーキテクチャエンジニア
1. シャシーおよび車両動力学の開発は、サスペンション、ステアリング、ブレーキ、ホイールエンド、横方向・縦方向制御などを含みます。 2. 車両全体の要件に基づき、規則に適合しつつ高性能なシャシーシステムを開発し、シャシー設計の各パラメータが車両性能に与える影響を理解し、比較検討と取捨選択を行います。 3. VI-Gradeまたはその他のソフトウェアを使用して車両動力学モデルを構築し、車両動力学シミュレーションを実施します。 4. Solidworksなどのモデリングソフトウェアや、Ansysなどの静力学および熱解析シミュレーションソフトウェアを使用して、シャシー部品の設計とシミュレーションを行います。 5. 要件に基づき、レーシングカーのアクティブ制御アルゴリズムやエネルギー回生アルゴリズムなどを開発し、分散型四輪駆動車両の動的アクティブ制御機能と優れた消費電力性能を実現します。 6. 車両全体のテストとチューニングにおいて、シャシーパラメータと制御パラメータを修正し、機械的要素と動的制御アルゴリズムの完璧な融合を追求し、レーシングカーの性能向上を目指します。 7. テストデータを収集、整理、分析し、時系列データベースソフトウェアを使用して車両全体のデータ分析と可視化を実現し、その後の車両チューニングとアルゴリズム最適化を指導します。 8. 将来的には、無人運転フォーミュラカーの横方向・縦方向制御などの機能の開発とテストを継続します。 関連ツールチェーン:
CATIA; Solidworks; MATLAB/Simulink; Vector CANoe; DolphinDB;VI-grade; Carsim; ANSYS; inspire; Hypermesh

ボディ・車両パッケージングエンジニア
1. DReレーシングカーの骨格を構築し、DIAN Racing独自のモノコックを定義します。電動フォーミュラレーシングカーのパワートレインシステムレイアウト、シャシーレイアウトを開発します。CATIAおよびCFD関連の産業用ソフトウェアを使用し、電動および無人システムの配置要件に基づき、ボディ設計とシミュレーションを行い、将来の数世代にわたる電動および無人運転フォーミュラレーシングカーに対応可能な汎用ボディプラットフォームを開発します。 2. モノコック外形のモデリング最適化を行い、他のエンジニアの組み立て要件を満たすとともに、ボディ軽量化の重要なステップとします。 3. モノコックの積層複合材料の比較シミュレーションを通じて、車体の強度を確保しながら大幅な軽量化を実現し、レーシングカーの性能を向上させます。内部インサートのシミュレーション設計を行い、将来の他システムの組み立てを支援します。 4. 複合材料パネル試験を完了し、データを収集・分析して、車両全体のモノコック開発を指導します。 5. 他のエンジニアと協力し、車両の最終組み立て設計を完了します。 6. 将来的には、無人運転フォーミュラレーシングカーのドライブ・バイ・ワイヤシャシー、LiDAR、車載コンピューティングユニットのハードウェア配置計画の策定を継続します。 関連ツールチェーン:
CATIA; Star-ccm+; MATLAB/Simulink; ANSYS; Hypermesh
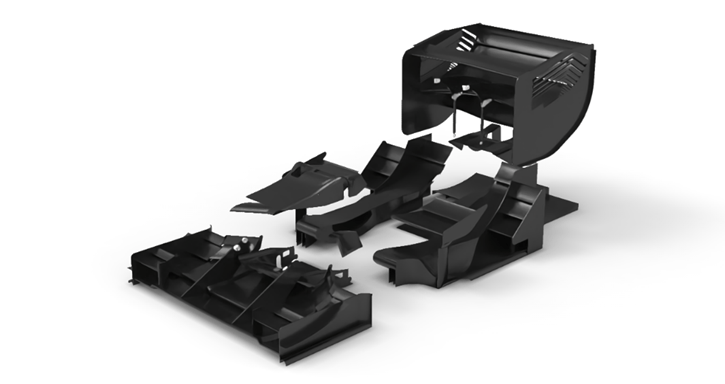
空気力学・エアロダイナミクスエンジニア
1. 車両全体の性能目標に基づき、レーシングカーの空力パッケージの設計・開発を主導します。
2. CFDソフトウェアを利用して、各種空力パッケージの設計、モデリング、シミュレーションを行い、異なる空力部品が車両全体に与える影響を把握します。 3. CFDソフトウェアを利用して車両全体の外部流れ場の解析を行い、異なる空力パッケージの組み合わせ案について、様々なシナリオや作動条件下での性能変化を比較し、後期の空力設計および車両動力学性能のチューニング計画を指導します。 4. 複合材料製の空力パッケージを設計、製作します。 5. 空力パッケージの機能検証および性能検証計画を策定し、実施します。 関連ツールチェーン:
CATIA;STAR-CCM+;ANSYS;BETA CAE

ヒューマンマシンシステム・安全システムエンジニア
1. 安全目標と競技規則に基づき、要件を満たすヒューマンマシン拘束システムを設計します。 2. 複合材料製の緩衝構造を自主開発・製作し、専門施設で実衝突試験を完了し、データを収集・分析します。 3. 優れたレーシングカーのヒューマンマシンインターフェースとシステムを設計します。 4. パッシブセーフティシステムの設計に加え、純電気レーシングカーに適した高電圧安全システムを設計、製作します。 関連ツールチェーン:
CATIA; ANSYS; Hypermesh; MATLAB/Simulink; Vector CANoe
03
電子電気システム
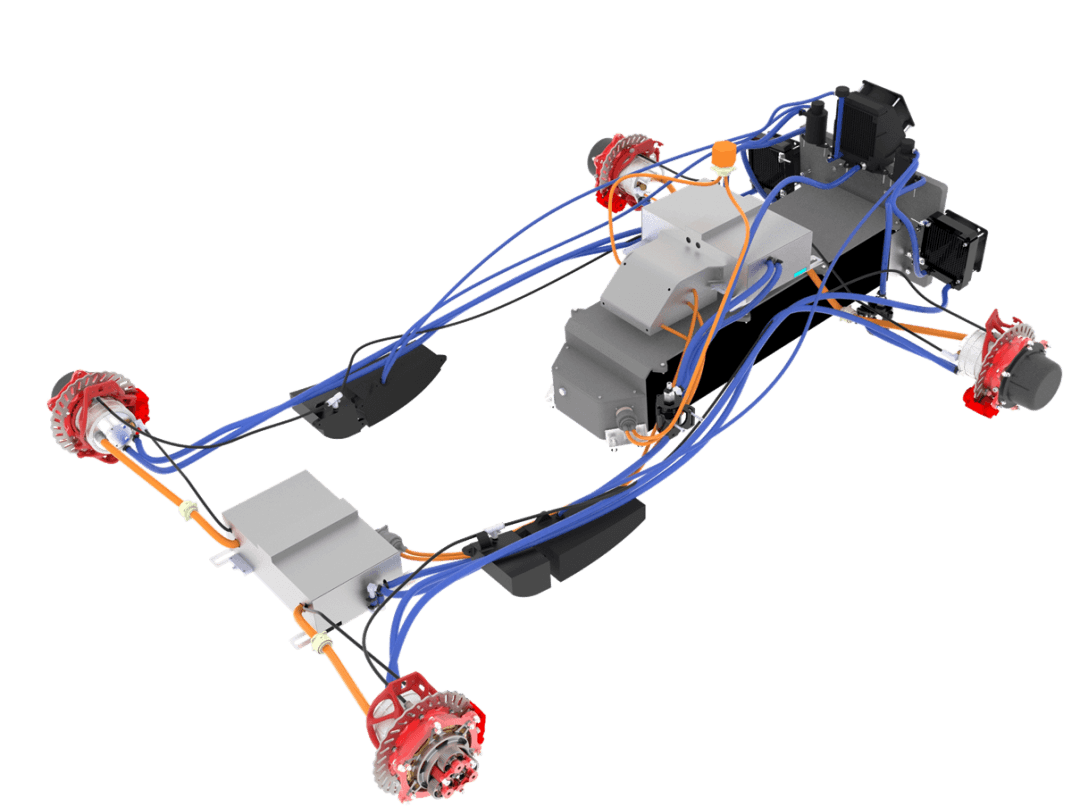
電動駆動システムエンジニア
1. レーシングカーの性能目標に基づき、技術動向と実現難度を総合的に判断し、適切な駆動システムの技術案と車両全体のレイアウト案を選択します。 2. 駆動システムのレイアウト案に基づき、合理的な駆動システムのケーブル配置と、それに適合するワイヤーハーネスの固定、保護、および電気接続案を決定します。 3. 電子制御システムの要件に基づき、低電圧電気システムのワイヤーハーネス配置と接続案を決定し、低電圧ワイヤーハーネスシステムの信号とピン定義を管理します。 4. 有限要素解析と実車テストデータに基づき、車両全体の放熱要件を正確に分析し、完全で信頼性の高いモーター、インバーター、バッテリー冷却システムを構築します。パラメータ最適化法やトポロジー最適化法などの手法を用いて、最小のシステムエネルギー消費と最軽量のシステム重量で、レーシングカーの高負荷条件下での放熱要件を満たします。 5. 自社開発のSiC-MOSFETインバーターの開発に参加し、他のメンバーと共に新世代モーターコントローラーの設計、デバッグ、およびキャリブレーションを完了します。 6. モーター設計関連の理論を学び、チームの新世代高速モーターの設計と開発に参加します。 関連ツールチェーン: CATIA/SolidWorks; Altium Designer; Vector CANoe; MATLAB/Simulink; ANSYS_WORKBENCH (FLUENT/ICEPAK) FLUID FLOW; Hyperlynx
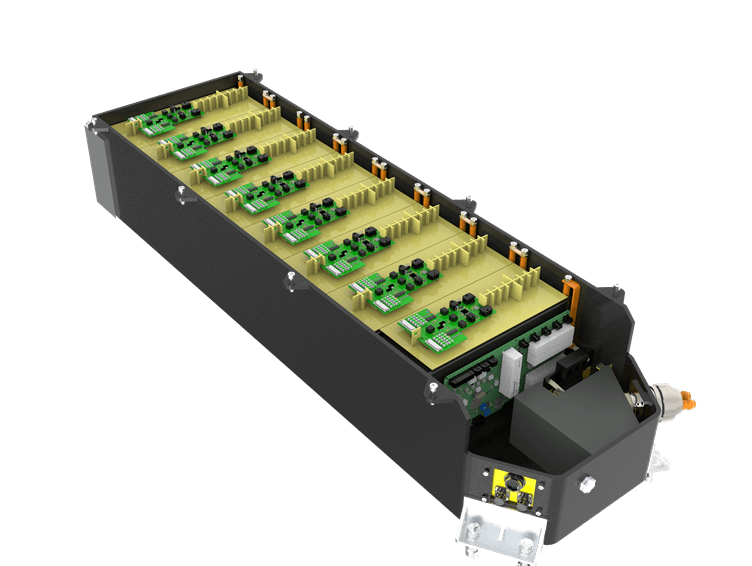
パワーバッテリーエンジニア
1. 車両全体の性能と消費電力要件に基づき、FSAE競技規則を総合して、高電圧パワーバッテリーの設計要件を定義します。 2. 設計要件に基づき、セル選定から開始し、適切なセルを選択し、レーシングカーに必要な600V高電圧バッテリープラットフォームを設計、構築、組み立て、テストします。 3. 選択したセルと車両全体のレイアウト要件に基づき、適切なセルグループ化案とセル接続案を設計します。 4. 全てのセルを保護し固定する、十分に堅牢で軽量なバッテリーボックス構造を設計します。 5. 電子制御システムと連携してBMSバッテリーマネジメントシステムを開発し、共に適切なセル電圧および温度サンプリング方式を確立します。 6. 設計要件とシミュレーション計算結果に基づき、適切なセル試験、モジュール試験、セル溶接試験、放熱性能試験、およびパック全体性能試験を策定・実施し、初期の設計案を検証し、最終的なバッテリーパック設計案を決定し、実施します。 関連ツールチェーン: CATIA/SolidWorks; MATLAB/Simulink ; ANSYS_WORKBENCH (FLUENT/ICEPAK)
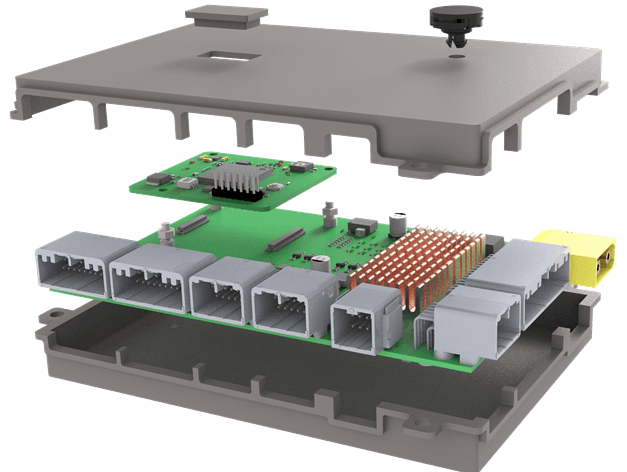
組み込みシステムエンジニア
1. 車両制御の要求に基づき、適切な電子制御システムアーキテクチャを決定する;
2. 各電子制御ノードの機能を定義し、車両通信ネットワークを構築する;
3. 組み込みハードウェア開発に関する知識を学び、電子部品の選定とPCBレイアウトを含む組み込みシステム設計を完了し、ドメインコントローラ、BMS、インストルメントパネルなどの電子制御ノードを設計する;
4. 組み込みシステムハードウェアの加工とデバッグを完了し、ハードウェア設計の誤りを排除し、信頼性が高く安定した電子制御ユニットを設計する;
5. 対応する組み込みソフトウェアを開発し、電子制御ソフトウェアの開発とデバッグを完了する;
6. 車両電子制御システムのデバッグプラットフォームを構築し、車両CAN通信ネットワークをデバッグし、CANネットワークの通信障害を排除し、車両電子制御システムの安定した運用を確保する;
**関連ツールチェーン:
**Altium Designer; CubeIDE/S32DS/VScode; Simulink/Model Based Develop Toolbox; Vector CANoe
04
無人システム
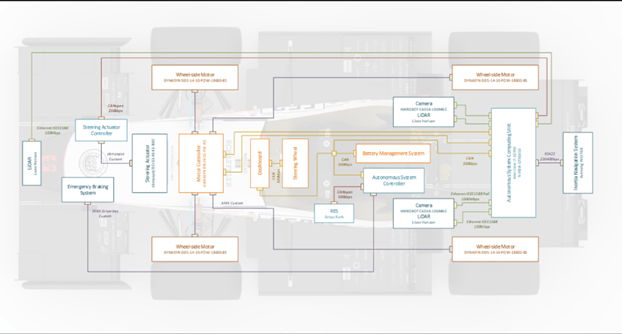
無人システムエンジニア
1. 無人運転の機能目標と大会規則に基づき、無人フォーミュラカー用の無人システムを開発する;
2. 無人システムの各階層モジュールの要件に基づき、走路認識とマッピング、経路計画と意思決定、車両運動制御、ノード情報処理と論理制御など、複数の機能モジュールのコード開発を実装する;
3. シミュレーション環境を構築し、無人システムの各機能モジュールに関連するテストとパラメータ調整を実施する;
4. エンタープライズコンピューティングプラットフォームの関連ツールチェーンに基づき、アルゴリズムの車載コンピューティングプラットフォームへの移行を実現する;
5. 無人システムの実車シナリオに関連するテストと調整を行う。
**関連ツールチェーン:
**Linux OS;C/Python IDE;MATLAB/Simulink;Carsim
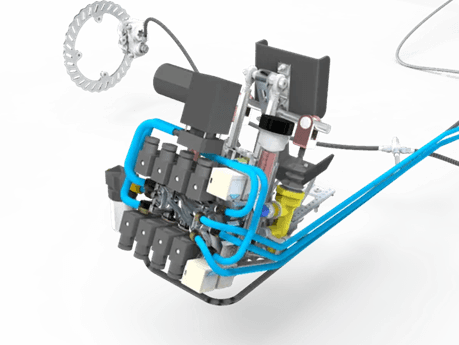
ドライブバイワイヤシャーシエンジニア
1. ドライブバイワイヤシャーシの機能目標と大会規則に基づき、無人フォーミュラカー用のドライブバイワイヤシャーシシステムを開発する;
2. 制御層の出力応答要件に基づき、ドライブバイワイヤシャーシの機械案の選定、構造設計、および電気システム案の選定と構築を完了する;
3. ドライブバイワイヤシャーシのモータ制御など、組み込みシステムのハードウェア設計と組み込みソフトウェア開発を完了し、関連するモータ制御アルゴリズムと信号応答を実現する;
4. ドライブバイワイヤシャーシのテストベンチを設計および構築し、制御アルゴリズムの最適化とパラメータ調整を実現する;
5. ドライブバイワイヤシャーシシステムの実車シナリオに関連するテストと調整を行う。
関連ツールチェーン:
Altium Designer;CubeIDE/S32DS/VScode; Simulink/Model Based Develop Toolbox; Vector CANoe;CATIA; Solidworks; ANSYS
2026 DIANRACING
03
部門の記憶
01
車体
2025年中国大会で、車体グループは損傷したフロントウィングの修理に一刻を争っていた。チーム全員が力を合わせ、コースからピットへ、ピットから車検テントへ、そして車検テントから再びコースへと全力で走り抜けた……。わずか30分、この情熱に満ちた若者たちは、駱崗公園の夕日を背に受け、車体グループとして完璧な答えを提出した。

02
電子電気
仲良し電気一家

03
シャシー
準優勝を手にした後、シャシーグループ全員がマシンE77と共にこの栄光の瞬間を写真に収めた。

04
無人システム
「無人」システム
05
ドライブバイワイヤシャシー
2025 FSACデザイン審査が無事終了し、ドライブバイワイヤシャシーの審査メンバーが記念撮影。

06
ビジネスマネジメント
表彰式の夜、ビジネスマネジメントの学生たちがE77と心を込めて記念撮影。

2026 DIANRACING
04
新メンバー募集について
DIAN Racingの今回の春季新メンバー募集の全体プロセスは、応募登録 - 選考課題の完了 - 面接日程の確認 - 面接 - 合格通知 となります。選考課題を完了し提出することで、面接資格を得ることができます。私たちは、WeChat公式アカウント上の募集要項だけでは、チームの活動内容を十分に理解していただくのが難しいと考えています。そのため、面接では皆さんの課題についてコメントするだけでなく、さまざまな職種について詳しくご紹介します。

募集プロセス
日付
事項
備考
3.6
募集情報・選考課題の公開
WeChat公式アカウント、公式ウェブサイトにて公開
3.6-3.22
応募情報の登録、選考課題の完了と提出
課題の指示に従いメールで提出
3.23-3.26
面接日程の確認
応募時に登録したメールアドレスに連絡しますので、メールを必ずご確認ください。
3.28-3.29
面接
_
3.31
合格オファーの送信
メールにて送信
選考課題
**各職種の課題は、それぞれ3つのレベルに分かれています。各レベルに1〜2問の課題があります。**各職種とも、合計3〜4問を完了する必要があります。
レベル1の課題の難易度は非常に低く、検索エンジンを利用したり、資料を調べたり、教科書をめくったりするだけで、一つの公式や一章分の知識のまとめによって全ての解答を完了できます。問題形式は計算問題、質問形式の問題、既に学習したツールを使って解答できる問題などがあります。無人システムチームは、レベル1の課題を完了し、期限までに提出すれば面接資格を得られます。
レベル2の課題は難易度が上がり、大学1年次に学習した知識やスキルを問うほか、いくつかの新しい理論知識を自主的に学習してから解答する必要があるかもしれません。フォーミュラ電気チームは、レベル2の課題を完了し、期限までに提出すれば面接資格を得られます。
レベル1とレベル2の課題は、各自で完了してください。資料調査やコミュニケーションに制限はありませんが、他人の成果を利用した部分は、その旨を明確に記載してください。
レベル3の課題が最も難しい部分です。全部または一部を完了することで、合格評価が大幅に上がります。こちらの課題では、専門的なソフトウェアを使用する場合があります。
技術職には、CATIA、SolidWorks、MATLAB/Simulink、ANSYSなどが含まれますが、これらに限定されません。
ビジネス・マネジメント職では、Officeソフトの使用が求められますが、その他のツールを追加で使用しても構いません。また、レベル3の一部の課題では、レベル2の課題の結論を利用する場合もあります。レベル3の課題については、2人でチームを組んで完了することが許可されていますが、協力の形式と各自が担当した内容を明確に記載する必要があります。優れたチームワーク能力は、あなたとあなたのパートナーの評価を高めると考えています。
面接では、提出された課題に基づいて質問し、そこから発展させた議論を行います。ビジネス職の面接では、3〜5分程度のプレゼンテーションを準備する必要があるかもしれません。
画像提供丨DIAN Racing
文丨張凱雯
レイアウト丨鄔佳宜 金天祺
編集担当丨同済大学自動車メディアセンター 呉 楠
審査丨王嬌楠
最終確認丨史静遠 周益帆